test
Annotate
Show/hide annotations(H)
train
Labels
Attributes
Raw Data
Annotations
Group:
instances
CLASSES
LAYERS
traffic_sign
1
vehicle
1
Unused Classes
bicycle
bike
motobike
motorcycle
passenger_car
traffic_light
truck
walker
Attributes
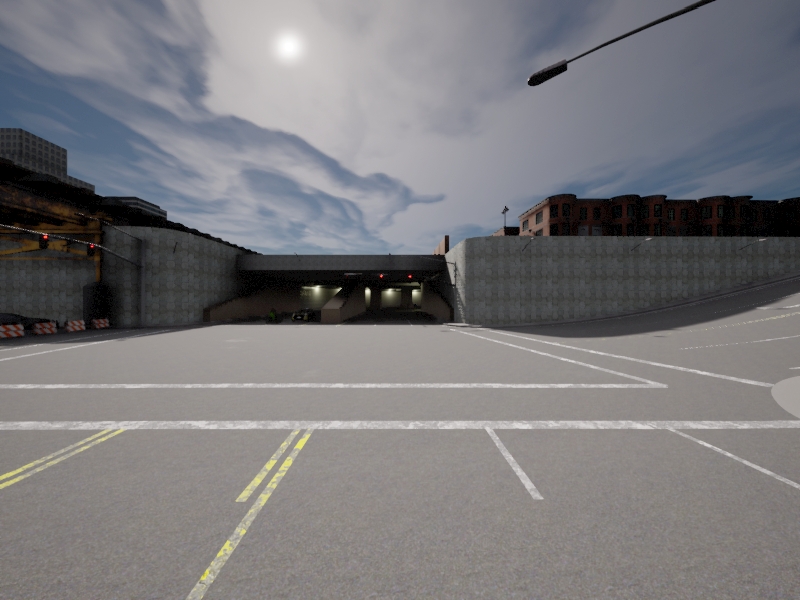
Town01_004380.png
640x380
0.24MP
Updated Jun 4, 2022
12:59AM
GMT+00:00
Training Set
Annotation History
Loading...
Raw Data
{
"accumulator": null,
"annotation_jobs": [
"6XuavOh2ocYWAOuadLhe/LS72f57GorbiDr96QdHw",
"K4nPjFtFil5sDTjLxr9w/4nfzDKvoIgRJvvkaMhD6",
"uQPruf6LU6IeOSeRBX9V/uS68v0qKPrdgtcC2P43f"
],
"annotations": {
"instances": {
"original": {
"annotation": "<annotation>\n\t<folder>_rgb</folder>\n\t<filename>Town01_004380.png</filename>\n\t<path>/home/daniel/CARLA_0.9.5/PythonAPI/examples/Dataset/Town01_40_vehicles/_rgb/004380.png</path>\n\t<source>\n\t\t<database>Unknown</database>\n\t</source>\n\t<size>\n\t\t<width>640</width>\n\t\t<height>380</height>\n\t\t<depth>3</depth>\n\t</size>\n\t<segmented>0</segmented>\n\t<object>\n\t\t<name>vehicle</name>\n\t\t<pose>Unspecified</pose>\n\t\t<truncated>0</truncated>\n\t\t<difficult>0</difficult>\n\t\t<bndbox>\n\t\t\t<xmin>351</xmin>\n\t\t\t<ymin>198</ymin>\n\t\t\t<xmax>450</xmax>\n\t\t\t<ymax>269</ymax>\n\t\t</bndbox>\n\t</object>\n\t<object>\n\t\t<name>traffic_sign</name>\n\t\t<pose>Unspecified</pose>\n\t\t<truncated>0</truncated>\n\t\t<difficult>0</difficult>\n\t\t<bndbox>\n\t\t\t<xmin>407</xmin>\n\t\t\t<ymin>184</ymin>\n\t\t\t<xmax>418</xmax>\n\t\t\t<ymax>195</ymax>\n\t\t</bndbox>\n\t</object>\n</annotation>",
"format": "xml",
"source": "RectLabel"
},
"converted": "{\"key\":\"Town01_004380.png\",\"width\":640,\"height\":380,\"boxes\":[{\"label\":\"vehicle\",\"x\":399.5,\"y\":232.5,\"width\":99,\"height\":71},{\"label\":\"traffic_sign\",\"x\":411.5,\"y\":188.5,\"width\":11,\"height\":11}]}",
"used": true,
"key": [
"Town01_004380.png",
"Town01_004380.jpg",
"Town01_004380.jpeg",
"Town01_004380.png",
"Town01_004380.bmp"
]
},
"cars": {
"original": {
"annotation": "<annotation>\n <filename>Town01_004380.png</filename>\n <folder>_rgb</folder>\n <object>\n <bndbox>\n <xmax>450</xmax>\n <xmin>351</xmin>\n <ymax>269</ymax>\n <ymin>198</ymin>\n </bndbox>\n <difficult>0</difficult>\n <name>car</name>\n <pose>Unspecified</pose>\n <truncated>0</truncated>\n </object>\n <object>\n <bndbox>\n <xmax>418</xmax>\n <xmin>407</xmin>\n <ymax>195</ymax>\n <ymin>184</ymin>\n </bndbox>\n <difficult>0</difficult>\n <name>traffic sign</name>\n <pose>Unspecified</pose>\n <truncated>0</truncated>\n </object>\n <path>/home/daniel/CARLA_0.9.5/PythonAPI/examples/Dataset/Town01_40_vehicles/_rgb/004380.png</path>\n <segmented>0</segmented>\n <size>\n <depth>3</depth>\n <height>380</height>\n <width>640</width>\n </size>\n <source>\n <database>Unknown</database>\n </source>\n</annotation>",
"format": "xml",
"source": "RectLabel"
},
"converted": "{\"key\":\"Town01_004380.png\",\"width\":640,\"height\":380,\"boxes\":[{\"label\":\"car\",\"x\":399.5,\"y\":232.5,\"width\":99,\"height\":71},{\"label\":\"traffic sign\",\"x\":411.5,\"y\":188.5,\"width\":11,\"height\":11}]}",
"used": true,
"key": [
"Town01_004380.png",
"Town01_004380.jpg",
"Town01_004380.jpeg",
"Town01_004380.png",
"Town01_004380.bmp"
]
},
"car": {
"original": {
"annotation": "<annotation>\n <filename>Town01_004380.png</filename>\n <folder>_rgb</folder>\n <object>\n <bndbox>\n <xmax>450</xmax>\n <xmin>351</xmin>\n <ymax>269</ymax>\n <ymin>198</ymin>\n </bndbox>\n <difficult>0</difficult>\n <name>car</name>\n <pose>Unspecified</pose>\n <truncated>0</truncated>\n </object>\n <object>\n <bndbox>\n <xmax>418</xmax>\n <xmin>407</xmin>\n <ymax>195</ymax>\n <ymin>184</ymin>\n </bndbox>\n <difficult>0</difficult>\n <name>traffic sign</name>\n <pose>Unspecified</pose>\n <truncated>0</truncated>\n </object>\n <path>/home/daniel/CARLA_0.9.5/PythonAPI/examples/Dataset/Town01_40_vehicles/_rgb/004380.png</path>\n <segmented>0</segmented>\n <size>\n <depth>3</depth>\n <height>380</height>\n <width>640</width>\n </size>\n <source>\n <database>Unknown</database>\n </source>\n</annotation>",
"format": "xml",
"source": "RectLabel"
},
"converted": "{\"key\":\"Town01_004380.png\",\"width\":640,\"height\":380,\"boxes\":[{\"label\":\"car\",\"x\":399.5,\"y\":232.5,\"width\":99,\"height\":71},{\"label\":\"traffic sign\",\"x\":411.5,\"y\":188.5,\"width\":11,\"height\":11}]}",
"used": true,
"key": [
"Town01_004380.png",
"Town01_004380.jpg",
"Town01_004380.jpeg",
"Town01_004380.png",
"Town01_004380.bmp"
]
}
},
"camera": null,
"classes": [
"instances",
"cars",
"car"
],
"created": {
"_seconds": 1654293909,
"_nanoseconds": 758000000
},
"datasets": [
"6XuavOh2ocYWAOuadLhe",
"K4nPjFtFil5sDTjLxr9w",
"uQPruf6LU6IeOSeRBX9V"
],
"extension": "png",
"hashes": [
"0fdd5a8759b4a89968bf147cd4749d7d"
],
"height": 380,
"id": "lo88TpxPhAPgyxdz5Sn1",
"label": [
"Unlabeled"
],
"metadata": {
"no": "metadata"
},
"name": "Town01_004380.png",
"owner": "3F1uMn9CWxRwcvjBuVrT014GkTt1",
"projects": [
"6XuavOh2ocYWAOuadLhe",
"K4nPjFtFil5sDTjLxr9w",
"uQPruf6LU6IeOSeRBX9V"
],
"r": 0.9992316557817903,
"split": "train",
"split.6XuavOh2ocYWAOuadLhe": "train",
"split.K4nPjFtFil5sDTjLxr9w": "train",
"split.uQPruf6LU6IeOSeRBX9V": "train",
"tags": [
"6XuavOh2ocYWAOuadLhe:status:approved",
"K4nPjFtFil5sDTjLxr9w:status:approved",
"uQPruf6LU6IeOSeRBX9V:status:approved"
],
"updated": {
"_seconds": 1654304393,
"_nanoseconds": 390000000
},
"updatedDate": "Jun 4, 2022",
"updatedTime": "12:59AM",
"updatedTimezone": "+00:00",
"uploader": "3F1uMn9CWxRwcvjBuVrT014GkTt1",
"width": 640
}
{
"boxes": [
{
"label": "vehicle",
"x": 399.5,
"y": 232.5,
"width": 99,
"height": 71
},
{
"label": "traffic_sign",
"x": 411.5,
"y": 188.5,
"width": 11,
"height": 11
}
],
"height": 380,
"key": "Town01_004380.png",
"width": 640
}
Annotation Editor
Delete
Save (Enter)
Smart Polygon
Click inside to remove area or outside to expand.
Delete
Finish (Enter)


170%
Reset