Robotic_odor_source_localization
Annotate
Show/hide annotations(H)
train
Labels
Attributes
Raw Data
Annotations
Group:
Humidifier
Classes
Layers
Cardboard box
2
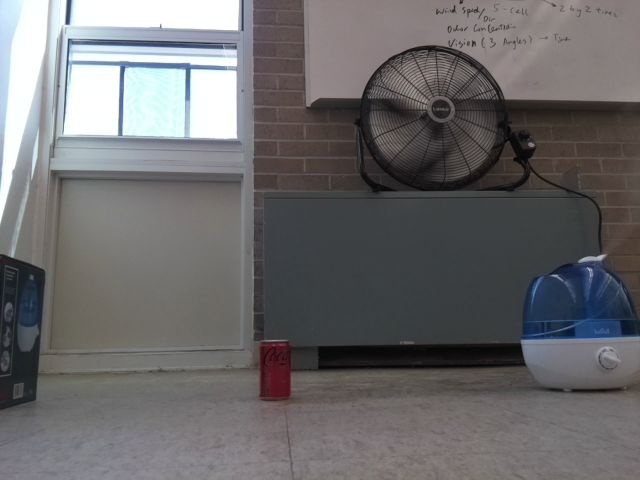
Coke can
1
Humidifier box
1
Unused Classes
First aid box
Humidifier
Water bottle
Attributes
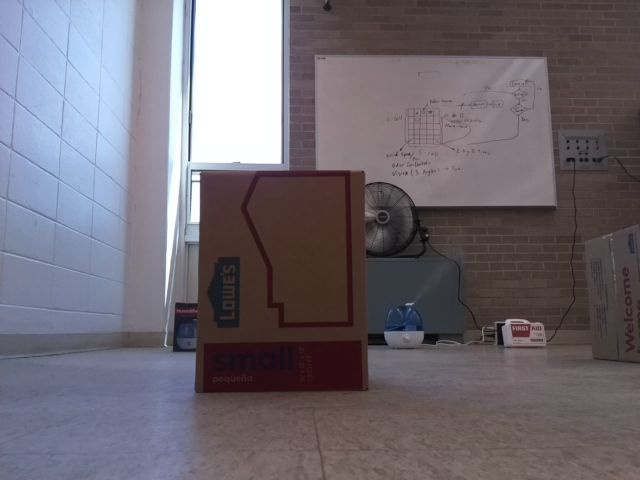
2-0_0-1_2_vision.png
640x480
0.31MP
Updated Jun 4, 2024
8:32PM
GMT+00:00
Training Set
Annotation History
Loading...
Raw Data
Source Data
{
"accumulator": null,
"annotation_jobs": [
"enzC6rdhsQsqaqRm5vTJ/kQSpLgCTBRo2McFXlCO4"
],
"annotations": {
"Humidifier": {
"by": "R2D4tLUBDieNupzDXuPu2LVSzKr1",
"converted": "{\"key\":\"2-0_0-1_2_vision.png\",\"width\":640,\"height\":480,\"boxes\":[{\"type\":\"polygon\",\"label\":\"Cardboard box\",\"x\":\"347.5000\",\"y\":\"240.0000\",\"width\":\"442.1429\",\"height\":\"480.0000\",\"points\":[[126.42857142857144,480],[140,0],[512.8571428571429,0],[568.5714285714287,480]]},{\"type\":\"polygon\",\"label\":\"Cardboard box\",\"x\":\"95.3571\",\"y\":\"316.7857\",\"width\":\"76.4286\",\"height\":\"139.2857\",\"points\":[[130,386.4285714285714],[57.142857142857096,385],[65,247.14285714285717],[133.57142857142858,249.28571428571428]]},{\"type\":\"polygon\",\"label\":\"Humidifier box\",\"x\":\"567.5000\",\"y\":\"333.2143\",\"width\":\"37.8571\",\"height\":\"63.5714\",\"points\":[[559.2857142857144,365.00000000000006],[586.4285714285716,362.8571428571429],[580.0000000000001,301.42857142857144],[548.5714285714286,303.57142857142856]]},{\"type\":\"polygon\",\"label\":\"Coke can\",\"x\":\"632.1429\",\"y\":\"355.3571\",\"width\":\"15.7143\",\"height\":\"35.0000\",\"points\":[[626.4285714285714,372.85714285714283],[624.2857142857142,338.5714285714286],[639.2857142857144,337.85714285714283],[640,372.14285714285717]]}]}",
"lastSet": "1717538508456"
}
},
"batches": [],
"camera": null,
"created": {
"_seconds": 1717533163,
"_nanoseconds": 436000000
},
"datasets": [
"enzC6rdhsQsqaqRm5vTJ"
],
"extension": "png",
"hashes": [
"b02a3cff8b29dd2781c45a9f20a4a680"
],
"height": 480,
"id": "CHWG5saCFETJM1bts4Ky",
"label": [
"Unlabeled"
],
"metadata": {
"no": "metadata"
},
"name": "2-0_0-1_2_vision.png",
"owner": "R2D4tLUBDieNupzDXuPu2LVSzKr1",
"projects": [
"enzC6rdhsQsqaqRm5vTJ"
],
"r": 0.75,
"split": "train",
"split.enzC6rdhsQsqaqRm5vTJ": "train",
"tags": [
"enzC6rdhsQsqaqRm5vTJ:status:annotated"
],
"updated": {
"_seconds": 1717533163,
"_nanoseconds": 436000000
},
"updatedDate": "Jun 4, 2024",
"updatedFromRegenerate": "1717538508456",
"updatedTime": "8:32PM",
"updatedTimezone": "+00:00",
"uploader": "R2D4tLUBDieNupzDXuPu2LVSzKr1",
"width": 640
}
Annotation Data
{
"boxes": [
{
"type": "polygon",
"label": "Cardboard box",
"x": "347.5000",
"y": "240.0000",
"width": "442.1429",
"height": "480.0000",
"points": [
[
126.42857142857144,
480
],
[
140,
0
],
[
512.8571428571429,
0
],
[
568.5714285714287,
480
]
]
},
{
"type": "polygon",
"label": "Cardboard box",
"x": "95.3571",
"y": "316.7857",
"width": "76.4286",
"height": "139.2857",
"points": [
[
130,
386.4285714285714
],
[
57.142857142857096,
385
],
[
65,
247.14285714285717
],
[
133.57142857142858,
249.28571428571428
]
]
},
{
"type": "polygon",
"label": "Humidifier box",
"x": "567.5000",
"y": "333.2143",
"width": "37.8571",
"height": "63.5714",
"points": [
[
559.2857142857144,
365.00000000000006
],
[
586.4285714285716,
362.8571428571429
],
[
580.0000000000001,
301.42857142857144
],
[
548.5714285714286,
303.57142857142856
]
]
},
{
"type": "polygon",
"label": "Coke can",
"x": "632.1429",
"y": "355.3571",
"width": "15.7143",
"height": "35.0000",
"points": [
[
626.4285714285714,
372.85714285714283
],
[
624.2857142857142,
338.5714285714286
],
[
639.2857142857144,
337.85714285714283
],
[
640,
372.14285714285717
]
]
}
],
"height": 480,
"key": "2-0_0-1_2_vision.png",
"width": 640
}
Annotation Editor
Delete
Save (Enter)
Smart Polygon
Click inside to remove area or outside to expand.
Delete
Finish (Enter)


180%
Reset