Hard Hat Sample
Annotate
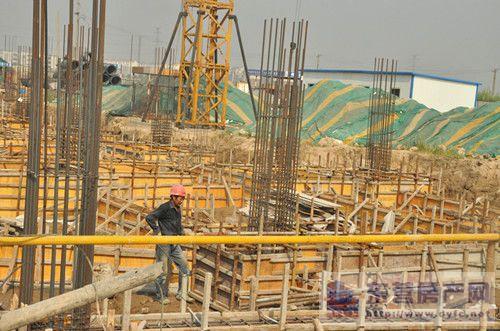
000027_jpg
Show/hide annotations(H)
train
Labels
Attributes
Raw Data
Annotations
Group:
Workers
CLASSES
LAYERS
helmet
5
Unused Classes
head
person
Attributes
000027_jpg
500x312
0.16MP
Updated Jul 25, 2024
1:17PM
GMT+00:00
Training Set
Annotation History
Loading...
Raw Data
{
"_migration_01_22_backup_datasets": [
"OXcbAdpFrioGUqaxPaZo"
],
"annotation_jobs": [
"YxW9JA8hPmSGCIXXgVbd/WV8zQn7mY6xkUeMUHtBP"
],
"annotations": {
"Workers": {
"original": {
"annotation": "<annotation>\n\t<folder></folder>\n\t<filename>000027_jpg.rf.b3d74bda410183ca40f17104eed8be92.jpg</filename>\n\t<path>000027_jpg.rf.b3d74bda410183ca40f17104eed8be92.jpg</path>\n\t<source>\n\t\t<database>roboflow.ai</database>\n\t</source>\n\t<size>\n\t\t<width>500</width>\n\t\t<height>312</height>\n\t\t<depth>3</depth>\n\t</size>\n\t<segmented>0</segmented>\n\t<object>\n\t\t<name>helmet</name>\n\t\t<pose>Unspecified</pose>\n\t\t<truncated>0</truncated>\n\t\t<difficult>0</difficult>\n\t\t<occluded>0</occluded>\n\t\t<bndbox>\n\t\t\t<xmin>158</xmin>\n\t\t\t<xmax>177</xmax>\n\t\t\t<ymin>127</ymin>\n\t\t\t<ymax>147</ymax>\n\t\t</bndbox>\n\t</object>\n\t<object>\n\t\t<name>helmet</name>\n\t\t<pose>Unspecified</pose>\n\t\t<truncated>0</truncated>\n\t\t<difficult>0</difficult>\n\t\t<occluded>0</occluded>\n\t\t<bndbox>\n\t\t\t<xmin>215</xmin>\n\t\t\t<xmax>239</xmax>\n\t\t\t<ymin>103</ymin>\n\t\t\t<ymax>123</ymax>\n\t\t</bndbox>\n\t</object>\n\t<object>\n\t\t<name>helmet</name>\n\t\t<pose>Unspecified</pose>\n\t\t<truncated>0</truncated>\n\t\t<difficult>0</difficult>\n\t\t<occluded>0</occluded>\n\t\t<bndbox>\n\t\t\t<xmin>276</xmin>\n\t\t\t<xmax>301</xmax>\n\t\t\t<ymin>98</ymin>\n\t\t\t<ymax>118</ymax>\n\t\t</bndbox>\n\t</object>\n\t<object>\n\t\t<name>helmet</name>\n\t\t<pose>Unspecified</pose>\n\t\t<truncated>0</truncated>\n\t\t<difficult>0</difficult>\n\t\t<occluded>0</occluded>\n\t\t<bndbox>\n\t\t\t<xmin>377</xmin>\n\t\t\t<xmax>404</xmax>\n\t\t\t<ymin>85</ymin>\n\t\t\t<ymax>109</ymax>\n\t\t</bndbox>\n\t</object>\n\t<object>\n\t\t<name>helmet</name>\n\t\t<pose>Unspecified</pose>\n\t\t<truncated>0</truncated>\n\t\t<difficult>0</difficult>\n\t\t<occluded>0</occluded>\n\t\t<bndbox>\n\t\t\t<xmin>321</xmin>\n\t\t\t<xmax>342</xmax>\n\t\t\t<ymin>90</ymin>\n\t\t\t<ymax>105</ymax>\n\t\t</bndbox>\n\t</object>\n</annotation>\n",
"format": "xml",
"source": "RectLabel"
},
"converted": "{\"key\":\"000027_jpg.rf.b3d74bda410183ca40f17104eed8be92.jpg\",\"width\":500,\"height\":312,\"boxes\":[{\"label\":\"helmet\",\"x\":166.5,\"y\":136,\"width\":19,\"height\":20},{\"label\":\"helmet\",\"x\":226,\"y\":112,\"width\":24,\"height\":20},{\"label\":\"helmet\",\"x\":287.5,\"y\":107,\"width\":25,\"height\":20},{\"label\":\"helmet\",\"x\":389.5,\"y\":96,\"width\":27,\"height\":24},{\"label\":\"helmet\",\"x\":330.5,\"y\":96.5,\"width\":21,\"height\":15}]}",
"used": true,
"key": [
"000027_jpg.rf.b3d74bda410183ca40f17104eed8be92.jpg",
"000027_jpg.rf.b3d74bda410183ca40f17104eed8be92.jpg",
"000027_jpg.rf.b3d74bda410183ca40f17104eed8be92.jpeg",
"000027_jpg.rf.b3d74bda410183ca40f17104eed8be92.png",
"000027_jpg.rf.b3d74bda410183ca40f17104eed8be92.bmp"
]
}
},
"batches": [],
"camera": null,
"classes": [
"Workers"
],
"created": {
"_seconds": 1721913466,
"_nanoseconds": 713000000
},
"datasets": [
"YxW9JA8hPmSGCIXXgVbd"
],
"extension": "jpg",
"hashes": [
"6647bd46198e7c7bb8f9666d09cb0fef"
],
"height": 312,
"id": "Pf8qtnBLMjKIdx3PTNtr",
"label": [
"Unlabeled"
],
"metadata": {
"no": "metadata"
},
"name": "000027_jpg",
"owner": "PD3li7qHhYNS37h2FwjQloGrnsc2",
"projects": [
"YxW9JA8hPmSGCIXXgVbd"
],
"r": 0.5314058264715478,
"split": "train",
"split.YxW9JA8hPmSGCIXXgVbd": "train",
"split.xZEzz6sVYpeIk2phkGaA": "test",
"tags": [
"YxW9JA8hPmSGCIXXgVbd:status:annotated"
],
"updated": {
"_seconds": 1721913466,
"_nanoseconds": 713000000
},
"updatedDate": "Jul 25, 2024",
"updatedTime": "1:17PM",
"updatedTimezone": "+00:00",
"width": 500
}
{
"boxes": [
{
"label": "helmet",
"x": 166.5,
"y": 136,
"width": 19,
"height": 20
},
{
"label": "helmet",
"x": 226,
"y": 112,
"width": 24,
"height": 20
},
{
"label": "helmet",
"x": 287.5,
"y": 107,
"width": 25,
"height": 20
},
{
"label": "helmet",
"x": 389.5,
"y": 96,
"width": 27,
"height": 24
},
{
"label": "helmet",
"x": 330.5,
"y": 96.5,
"width": 21,
"height": 15
}
],
"height": 312,
"key": "000027_jpg.rf.b3d74bda410183ca40f17104eed8be92.jpg",
"width": 500
}
Annotation Editor
Delete
Save (Enter)
Smart Polygon
Click inside to remove area or outside to expand.
Delete
Finish (Enter)


220%
Reset